Kad govorimo o robotima, obično govorimo i o nekom obliku napajanja tih robota, jer im je za rad potrebna električna energija. Najčešće su u pitanju baterije, kako bi roboti imali autonomiju, no neki roboti koji su stacionarni, spajaju se direktno na električnu mrežu.
No, tim istraživača s Kalifornijskog sveučilišta u San Diegu osmislila je mekanu robotsku hvataljku kojoj nije potrebna nikakva elektronika za rad. Ovaj inovativni tim robotičara, svoj je pothvat opisao u radu objavljenom u časopisu Science Robotics.

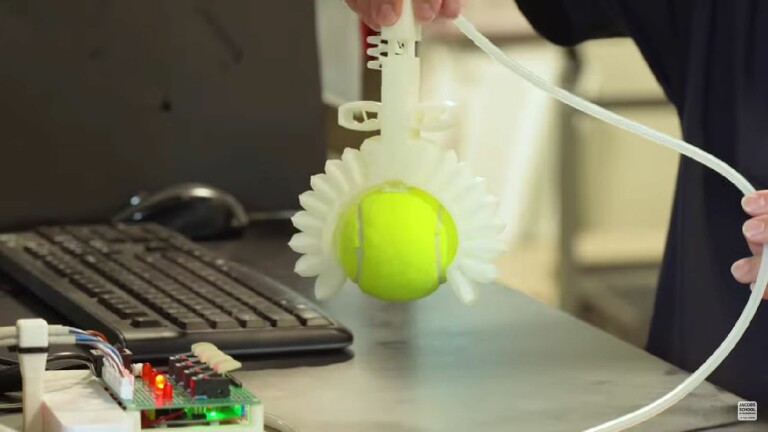
Kako sami kažu, htjeli su dizajnirati mekanu hvataljku koju bi se moglo koristiti čim izađe iz 3D printera, a koja bi istovremeno bila opremljena ugrađenim senzorima gravitacije i dodira. Tako su osmislili hvataljku koja može podići, držati i spustiti predmete koji su u njenoj blizini.
Dizajnirali smo funkcije tako da niz ventila omogućuje hvataljki da zahvati pri kontaktu i otpusti u pravom trenutku, pojasnio je u objavi za medije Yichen Zhai, postdoktorski istraživač u Laboratoriju za bioinspiriranu robotiku i dizajn na Kalifornijskom sveučilištu San Diego i vodeći autor rada. Ovo je prvi put da takva hvataljka može i uhvatiti i otpustiti. Sve što trebate učiniti je okrenuti hvataljku vodoravno. To pokreće promjenu protoka zraka u ventilima, zbog čega se dva prsta hvataljke otpuštaju.
Dodaje kako se zapravo radi o jednostavnoj fluidnoj logici koja omogućuje robotu da zapamti kada je uhvatio predmet i drži ga. Kada detektira težinu predmeta koji se gura u stranu, dok se rotira u horizontalu, otpušta predmet.
Autori ove zanimljive hvataljke ističu kako se ona može montirati na robotsku ruku u industrijskoj proizvodnji, rukovanju voćem i povrćem ili pak za proizvodnju hrane. Jedino što joj je potrebno za funkcioniranje je boca plina pod velikim pritiskom.
Kako bi omogućili da hvataljka bude spremna za korištenje odmah po završetku ispisivanja, razvili su novu metodu 3D printanja, koja uključuje mlaznicu pisača koja prati kontinuirani put kroz cijeli uzorak svakog ispisanog sloja.

To je kao da nacrtate sliku bez da ste ikada podigli olovku sa stranice, pojasnio je Michael T. Tolley, stariji autor na papiru i izvanredni profesor na Jacobsovoj školi strojarstva.
Nova metoda smanjuje vjerojatnost grešaka u ispisu, a omogućuje i ispis tankih stijenki, debljine do 0,5 milimetara. Tanje stranice i složeni, zakrivljeni oblici omogućuju veći raspon deformacija, što rezultira mekšom ukupnom strukturom. Istraživači su metodu temeljili na Eulerovoj stazi, koja je u teoriji grafova trag u grafu koji dodiruje svaki rub tog grafa jednom i samo jednom.
Kada smo slijedili ta pravila, uspjeli smo dosljedno ispisati funkcionalne pneumatske mekane robote s ugrađenim kontrolnim krugovima, rekao je Tolley.
Nadaju se da bi njihova hvataljka mogla biti od velike koristi istraživačima u laboratorijima jer je dovoljno jednostavna da ju se može brzo isprintati, a dovoljno mekana da može obavljati i osjetljivije zahvate.









