Razvoj robota iz godine u godinu sve više napreduje. Ono što smo nekad zamišljali kao velike strojeve koji se kreću usporeno, postali su robopsi koji trče velikom brzinom, mogu sami otvarati vrata, kuhati, penjati se po različitim preprekama pa čak i - plesati.
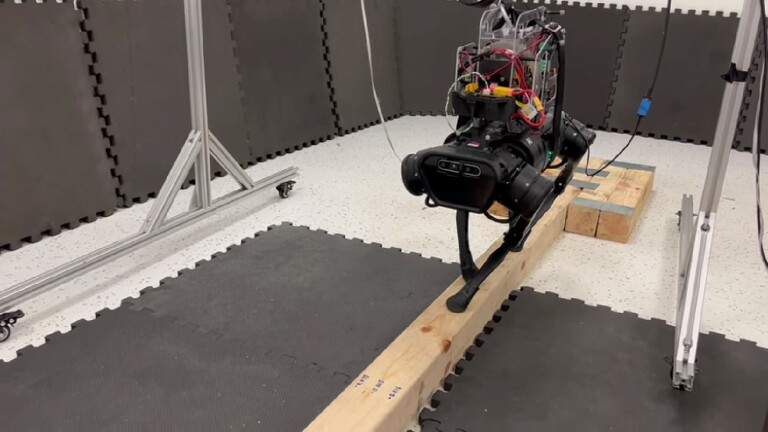
No, istraživači s Instituta za robotiku Sveučilišta Carnegie Mellon otišli su i korak dalje te napravili robota - gimnastičara. Dobro, možda je malo preambiciozno nazvati ga gimnastičarem. Ali njihov četveronožni robot toliko je okretan da hoda po uskoj gredi bez problema. Pothvat koji bi teško napravili i ljudi.
Mislim da to nitko do sad nije napravio, rekao je Zachary Manchester, voditelj Robotic Exploration Laba.
Prvi problem s kojim su se susreli bilo je kako omogućiti robotu održavanje ravnoteže. Naime, dok god su tri robotove noge u kontaktu s tlom, on može izbjeći prevrtanje. Ali ako kontakt s tlom imaju samo jedna ili dvije noge, robot obično završi na boku ili leđima.
Kako bi stvorili dovoljno spretnog robota koji može održavati ravnotežu na uskoj gredi, tim se koristio uređajima koji se koriste za kontrolu satelita u svemiru. Radi se o sustavu "pokretača reakcijskog kotača" (RWA) koji su montirali na stražnji dio robota i tako mu omogućili da uspostavi ravnotežu, neovisno o položaju njegovih stopala.
U osnovi imate veliki zamašnjak s pričvršćenim motorom. Ako okrenete teški zamašnjak na jednu stranu, satelit će se okrenuti na drugu stranu. Sada uzmite to i stavite na tijelo četveronožnog robota, pojasnio je Manchester.
Tim je izradio prototip montiranjem dva RWA-a na komercijalni robot Unitree A1 — jedan na osi nagiba i jedan na osi prevrtanja — kako bi se osigurala kontrola nad kutnim momentom robota. Kod RWA nije važno jesu li robotove noge u kontaktu s tlom jer RWA omogućuju neovisnu kontrolu orijentacije tijela.
Uz nekoliko manjih modifikacija i standardni algoritam za predviđanje modela, stvorili su robota koji je nizom eksperimenata dokazao da može biti okretan čak poput mačke. Da, spustili su robota naglavačke i on se dočekao na noge.
Ovakvi roboti u budućnosti bi se mogli koristiti za istraživanje područja na kojima bi bilo previše opasno za ljude, ili pak u misijama potrage i spašavanja nakon prirodnih katastrofa.
Manchester i njegov tim svog će robota i studiju koja ga prati predstaviti na Međunarodnoj konferenciji o robotici i automatizaciji 2023. koja će se krajem svibnja održati u Londonu.